Autonomous Steer By Wire

Led the design and implementation of UTFR's first fully autonomous Steering system.
Since 2023 was the first time the team had looked into Autonomous Systems, my responsibility was to find a way to actuate the steering system autonomously when the driver is not in the car. This process involved multiple iterations, bench testing and improving on each iteration. The final design was achieved in January 2024. The iterations involved are as follows:
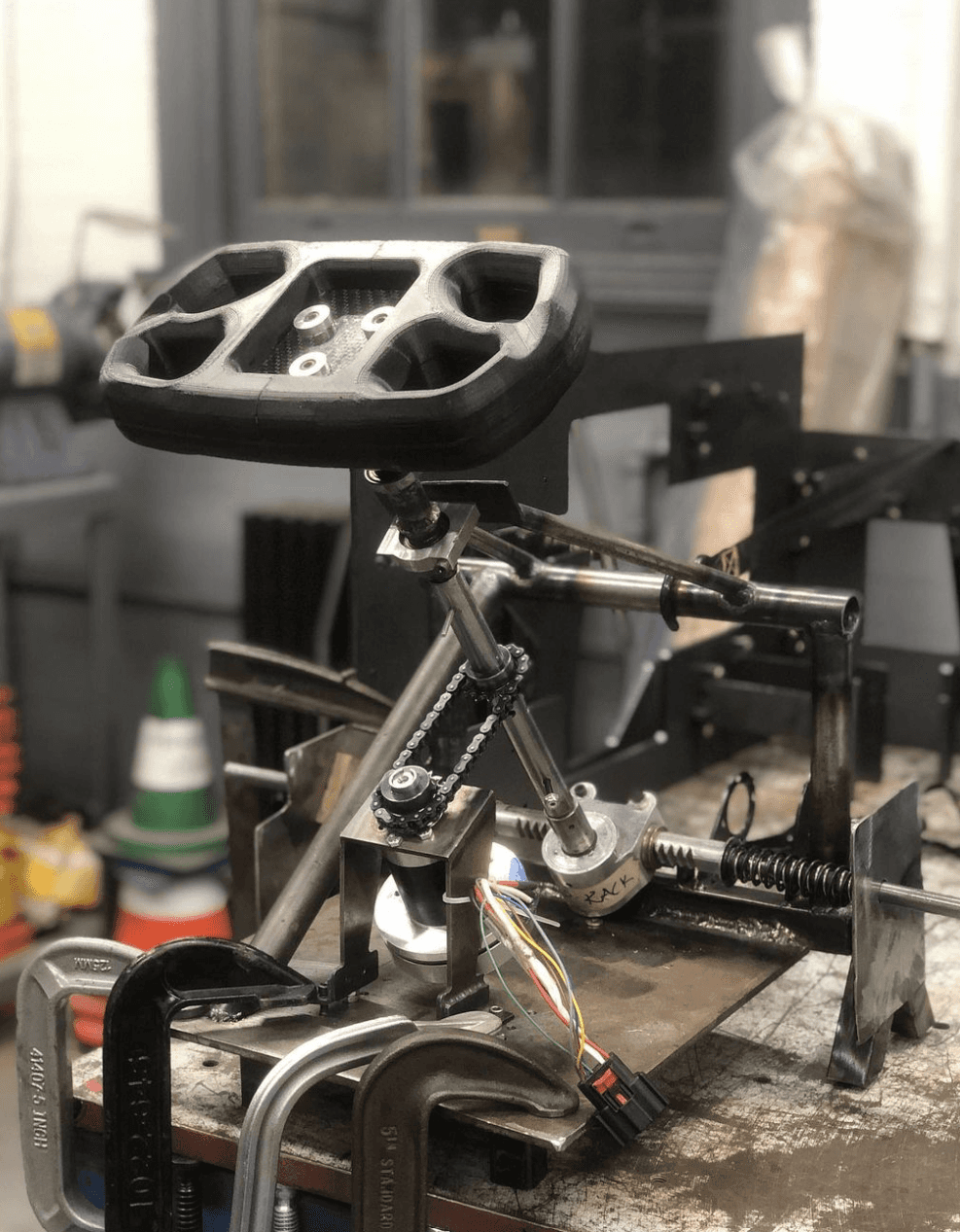
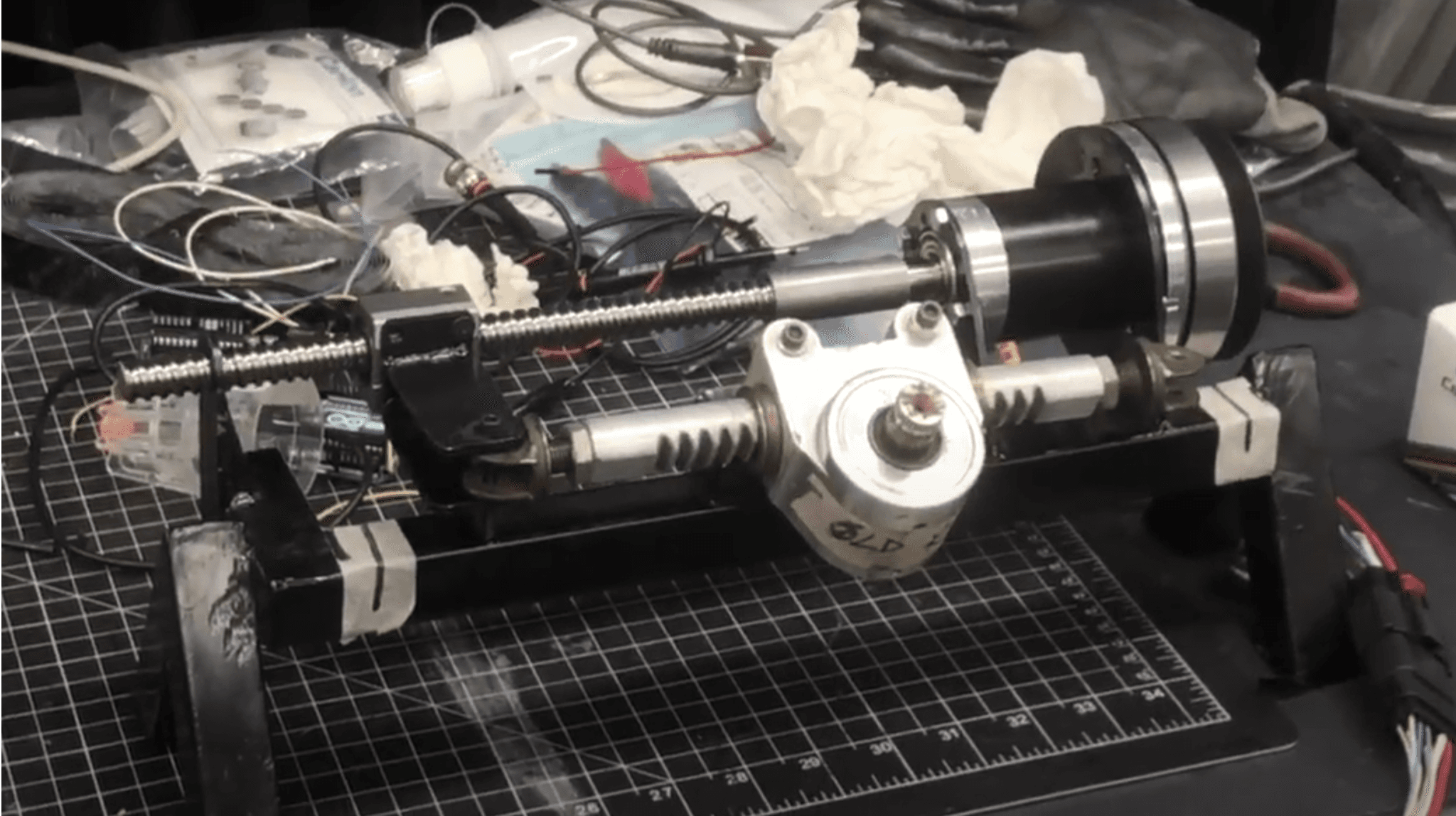
Steer By Wire 2023
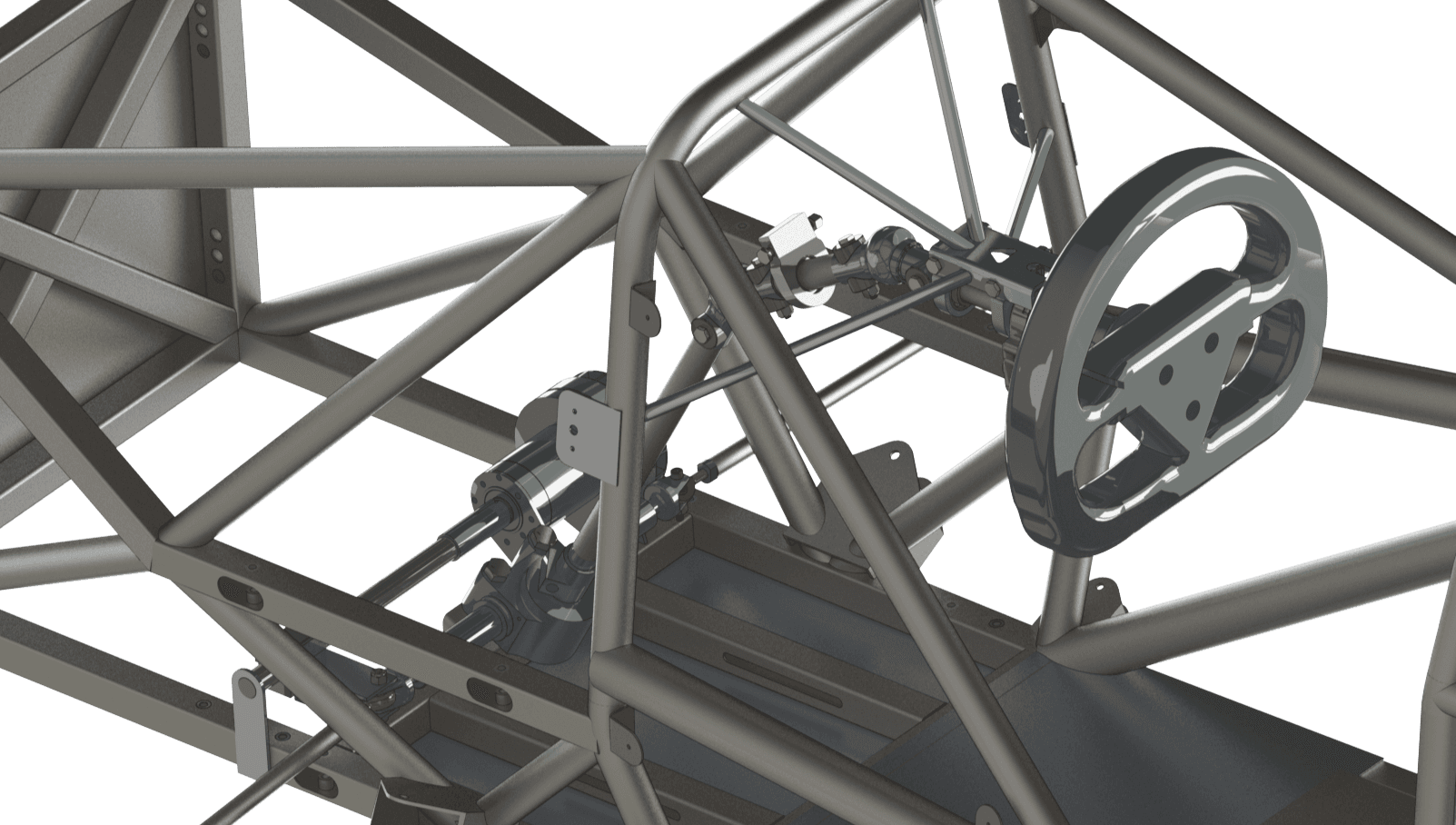
Parallel Rack Steering
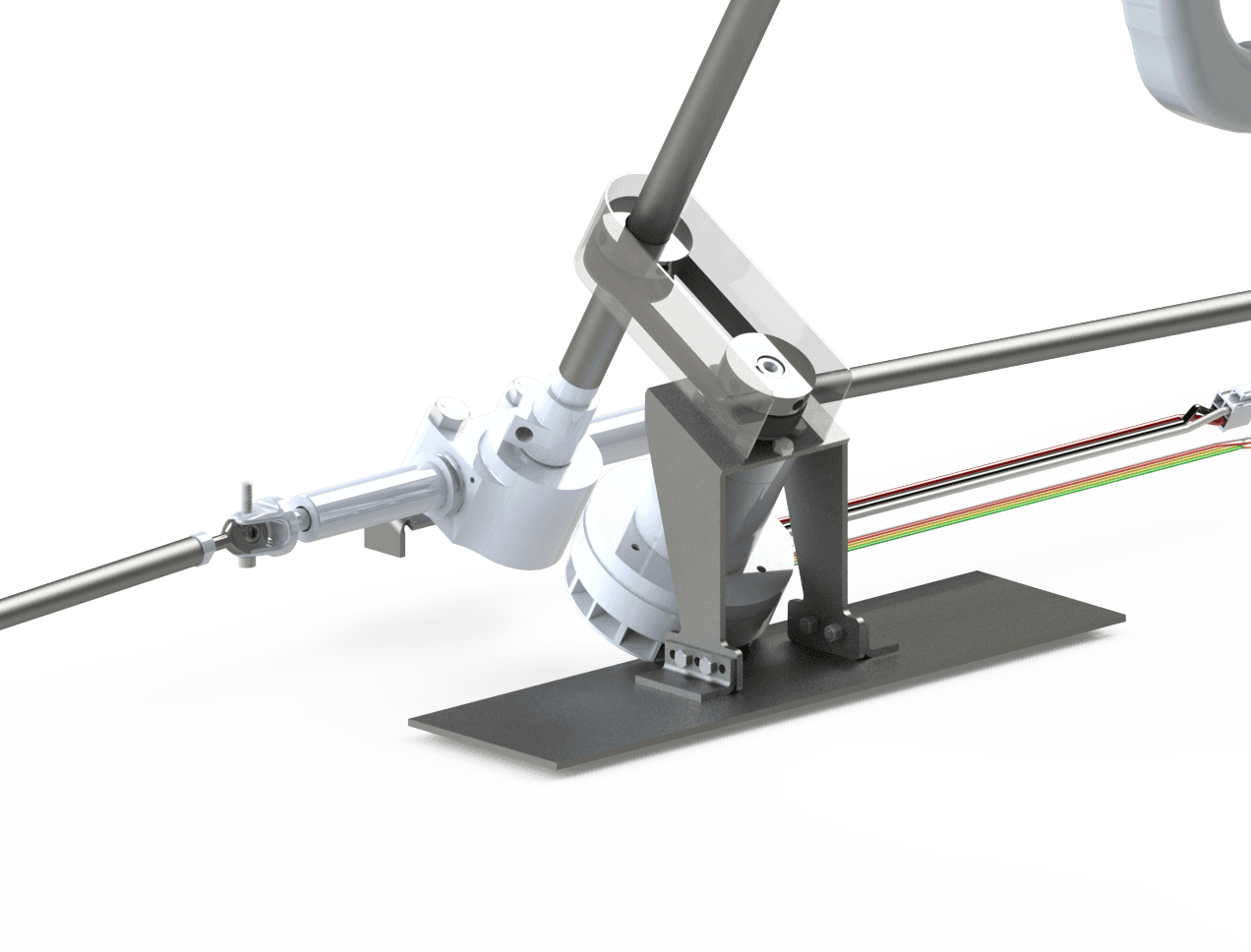
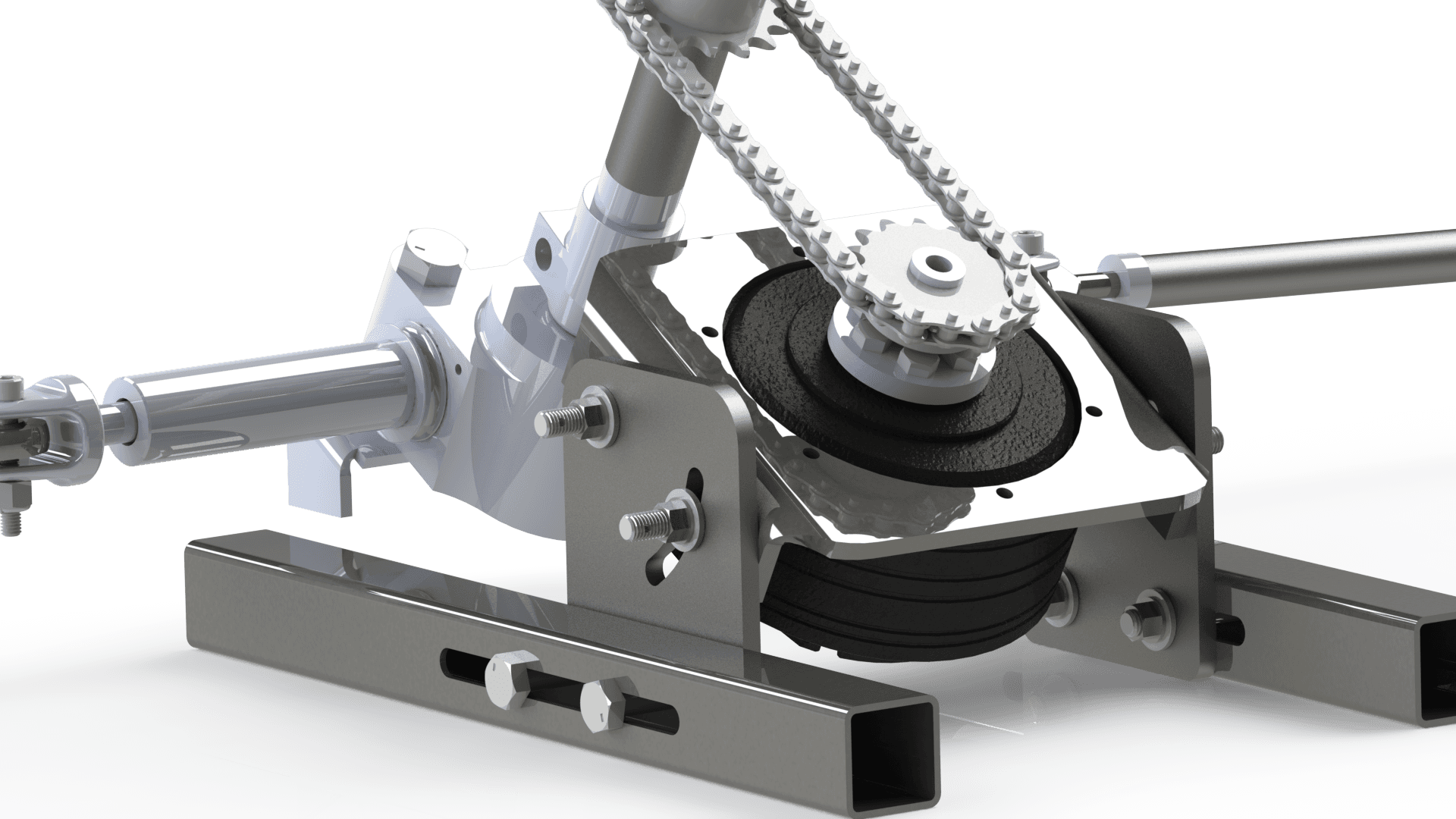
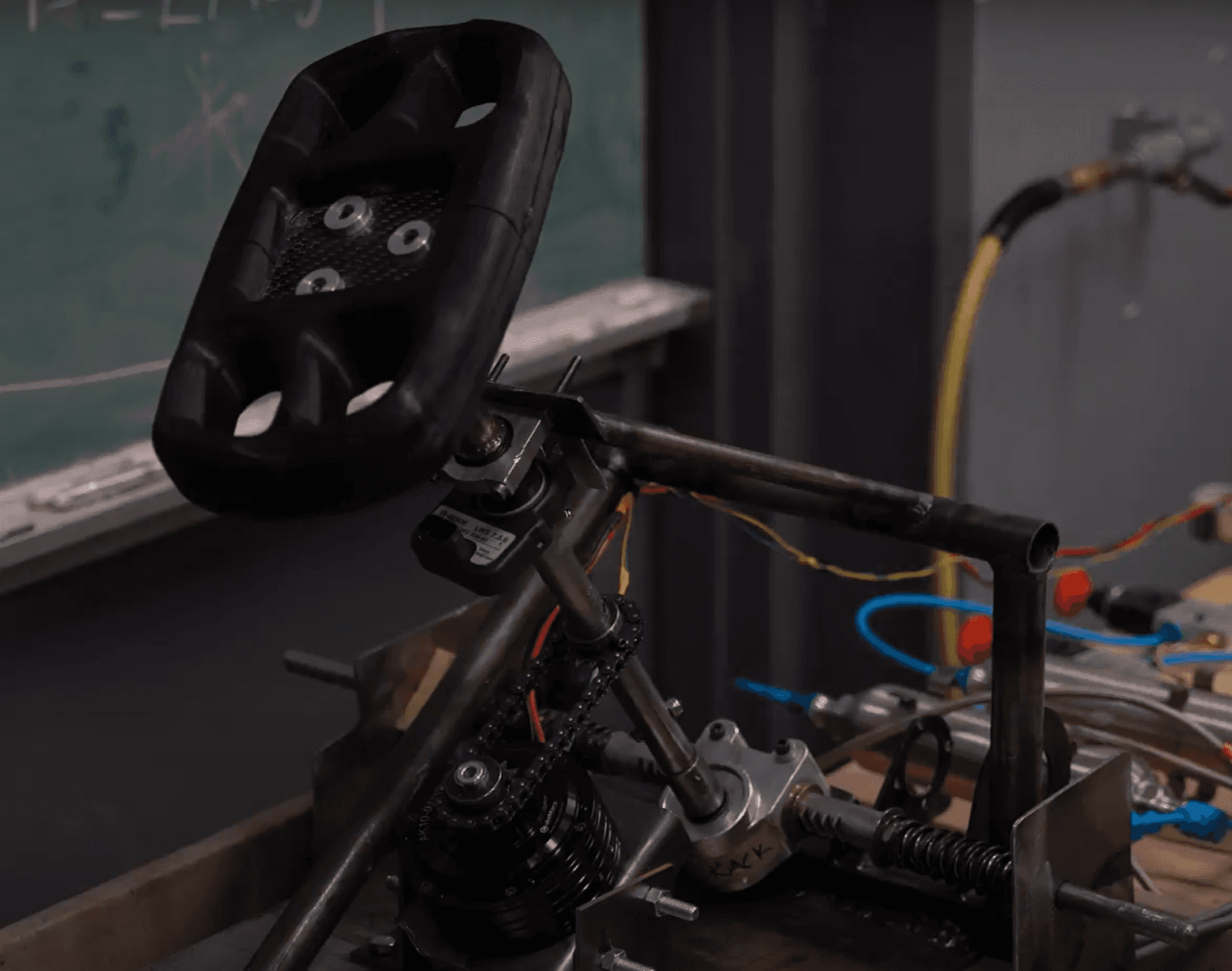
Steer By Wire 2024