Steering Systems Lead

Spearheaded the design and implementation of UTFR's first fully autonomous Steering system.
The overall objective of the system design was to:
Have fully autonomous capabilities
Have responsive feedback
Have minimum compliance in the system
Have ease of assembly
Autonomous capabilities
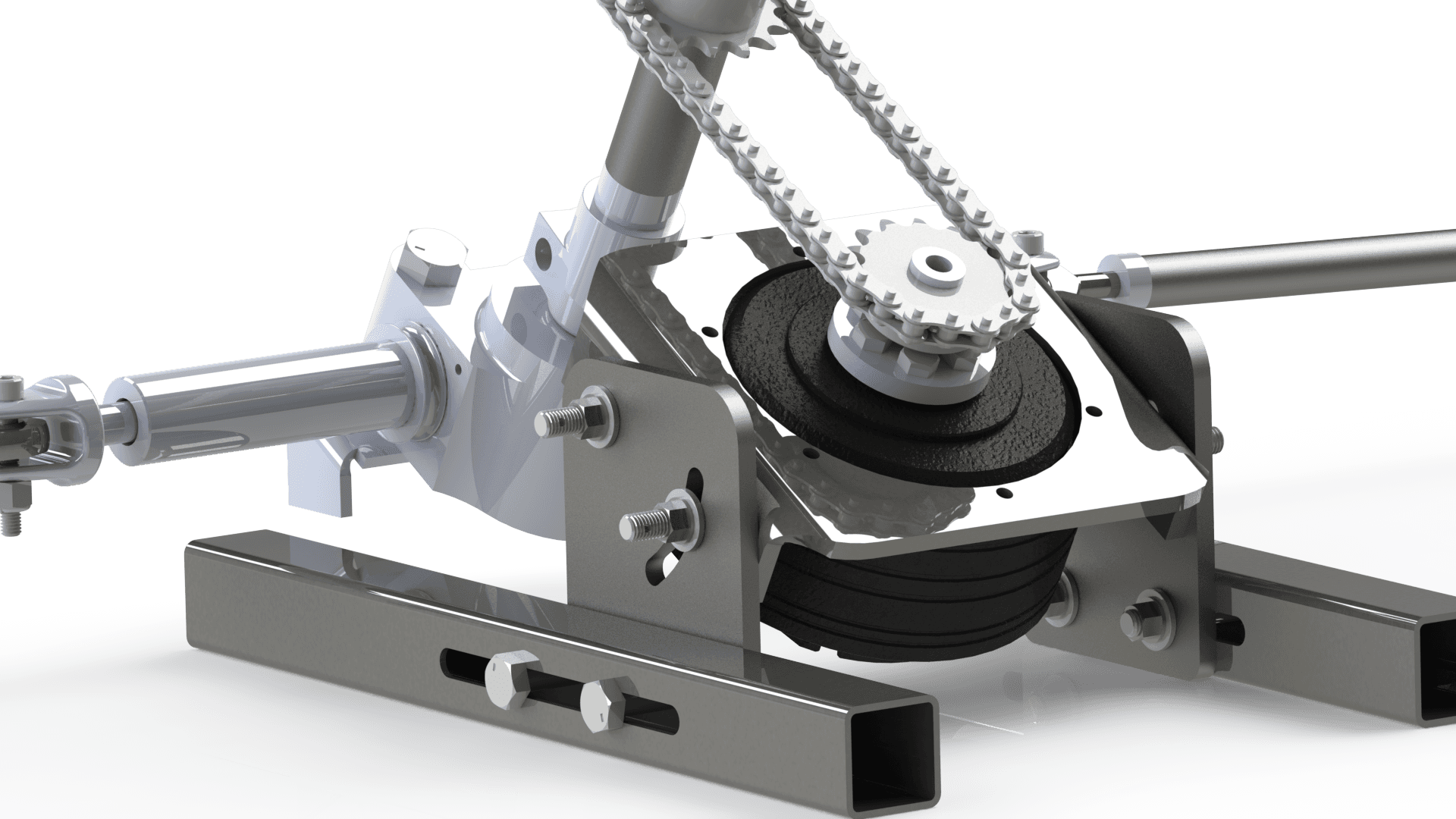
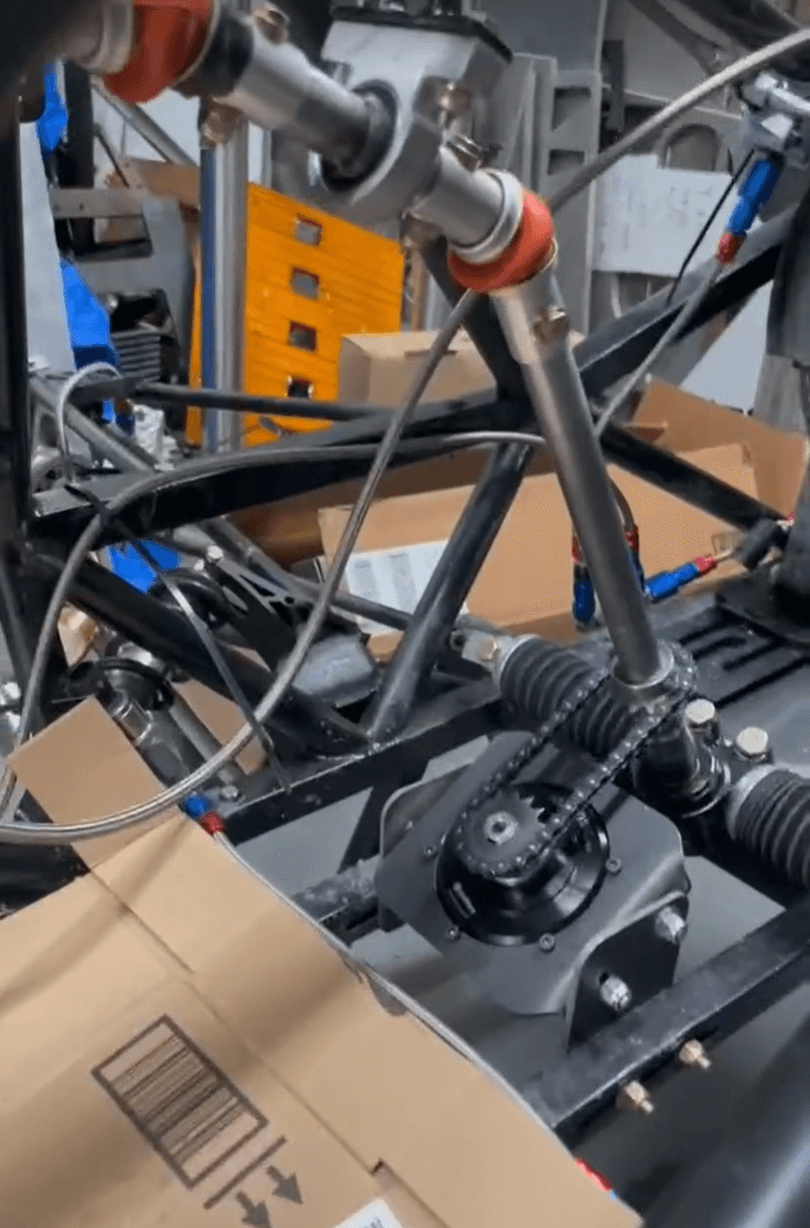
For the system to have a closed-loop feedback, a robotic BLDC equipped with a Hall effect sensor was coupled with a Steering Angle Sensor to relay information back and forth from the car computer to the motor. To read more about development of autonomous system, visit "Autonomous Steer By Wire" or "Parallel Rack SBW"
Suspension redesign
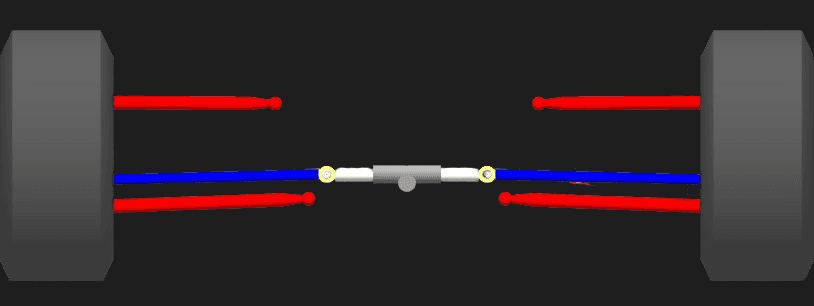
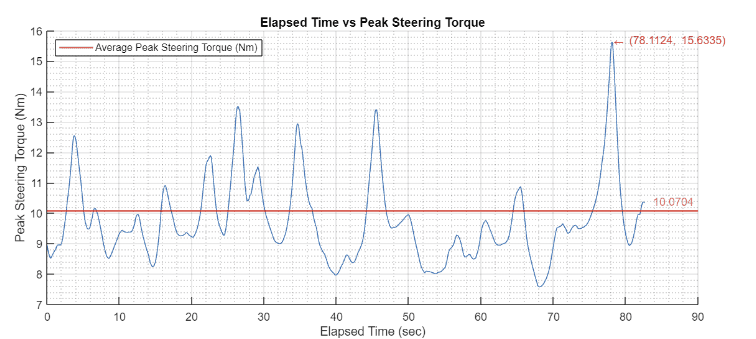
For a better responsive driver feedback, the steering system should require minimum torque to steer (around 5-12 Nm for racecars without power steering). Since past years required around 29Nm to steer the wheel, redesigning the front suspension geometry was required to accommodate the new tie rod outboard points.
This was achieved by simulating the geometry in a suspension design software Susprog3D and using those results, tire data, aero data from StarCCM, and track data from OptimumLap to plot a dynamic steering torque curve across a track in MATLAB. I was able to successfully decrease the average torque required by the driver from 21Nm to 11Nm.
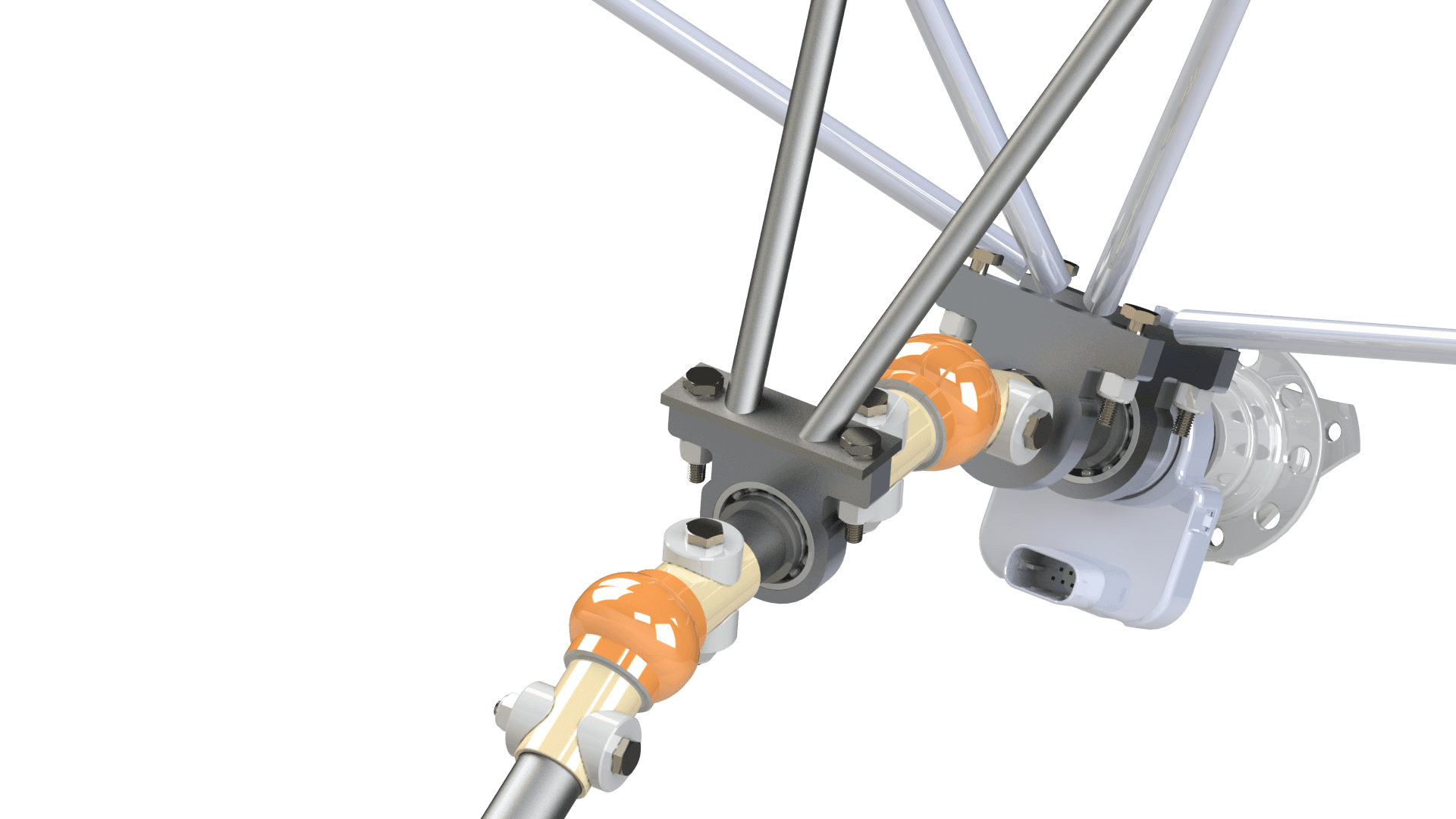
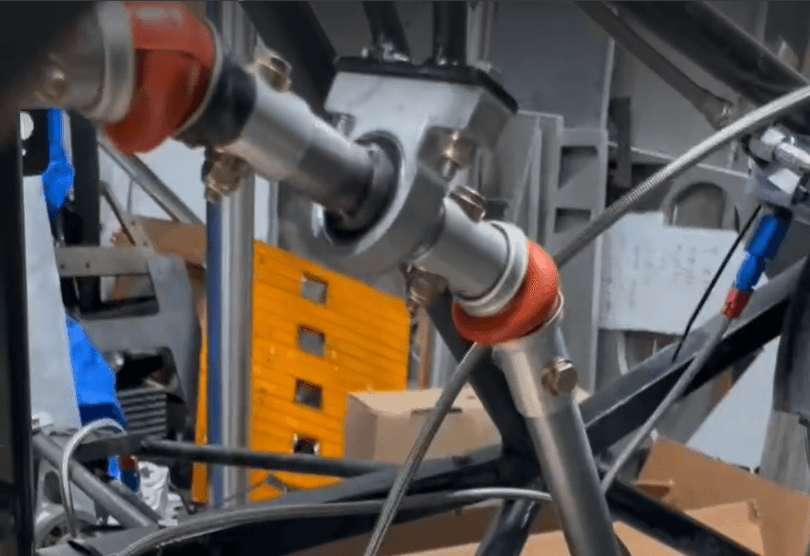
System freeplay
FSAE rules require a maximum of 7deg freeplay in the steering system. To minimize the freeplay in the system, a vertical bearing holder mounting was designed to keep the lateral movement to a minimum. This decreased the freeplay from 6.5deg in the past years to a maximum of 1.5deg
Competitions
1st Place New Hampshire 2023 (left), 5th place in Michigan 2023 out of 72 teams (right)

